Our research group integrates control theory, formal methods, and game theory to construct robust and provably correct autonomous robots and cyber-physical systems with a holistic dynamic and epistemic model of the world.
- Control theory + Formal methods: “Given the dynamic, uncontrollable environment of the robot, how to make intelligent decisions to achieve the task in high-level temporal logic”
- Control theory + Learning: “Given a stochastic system with unknown dynamics, how to adapt the control strategy to achieve the optimal performance?”
- Formal methods+ Game theory: “In the presence of adversarial environments, how to leverage the asymmetric information to ensure the security and safety of the robotic systems?” “How to incorporate game-theory and formal methods for intelligent reasoning and planning in cooperative and noncooperative environments?”
Please navigate to project items for more information for individual projects.
Our research is supported by the following:
 |
 |
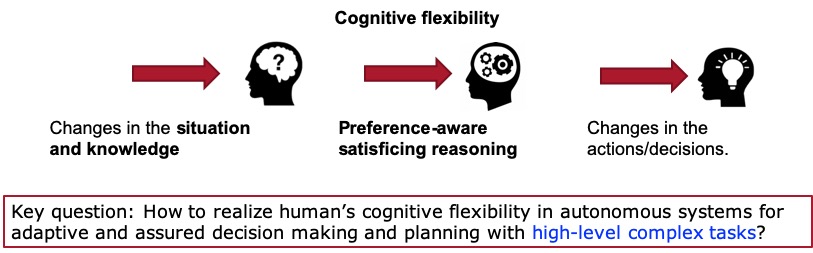
Preference-Aware Decision Making and Planning
This project aims at the major gap in theory and algorithms for preference-based decision-making in stochastic and dynamic environments, with complex mission objectives. Read More
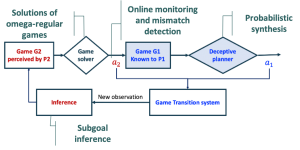
Game-Theoretic Synthesis for Autonomy
The research focuses on the verification and synthesis of trustworthy and autonomous systems with high-level reasoning and resilient decision-making capabilities. Read More

Intelligent Soft Robot Mobility in the Real World
The goal of this project is the creation of soft, snake-like robots that can navigate through real environments with confined spaces, fragile objects, clutter, rough and/or granular surfaces. Read More
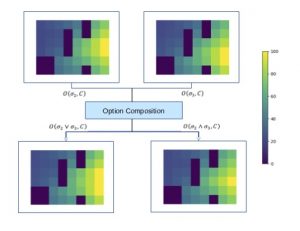
Learning-based Planning with Temporal Logic Constraints
This project is to develop a model-free reinforcement learning method for stochastic planning under temporal logic constraints. Read More

Semantic SLAM and planning
Our initial effort is focused on building a complete framework for Semantic SLAM. Our algorithm would take monocular and odometry measurements as input and output the estimations of the sensor state trajectory and the positions, shapes, and classes of the objects in the environment. Read More